LiDAR-SLAM Mobile Robot

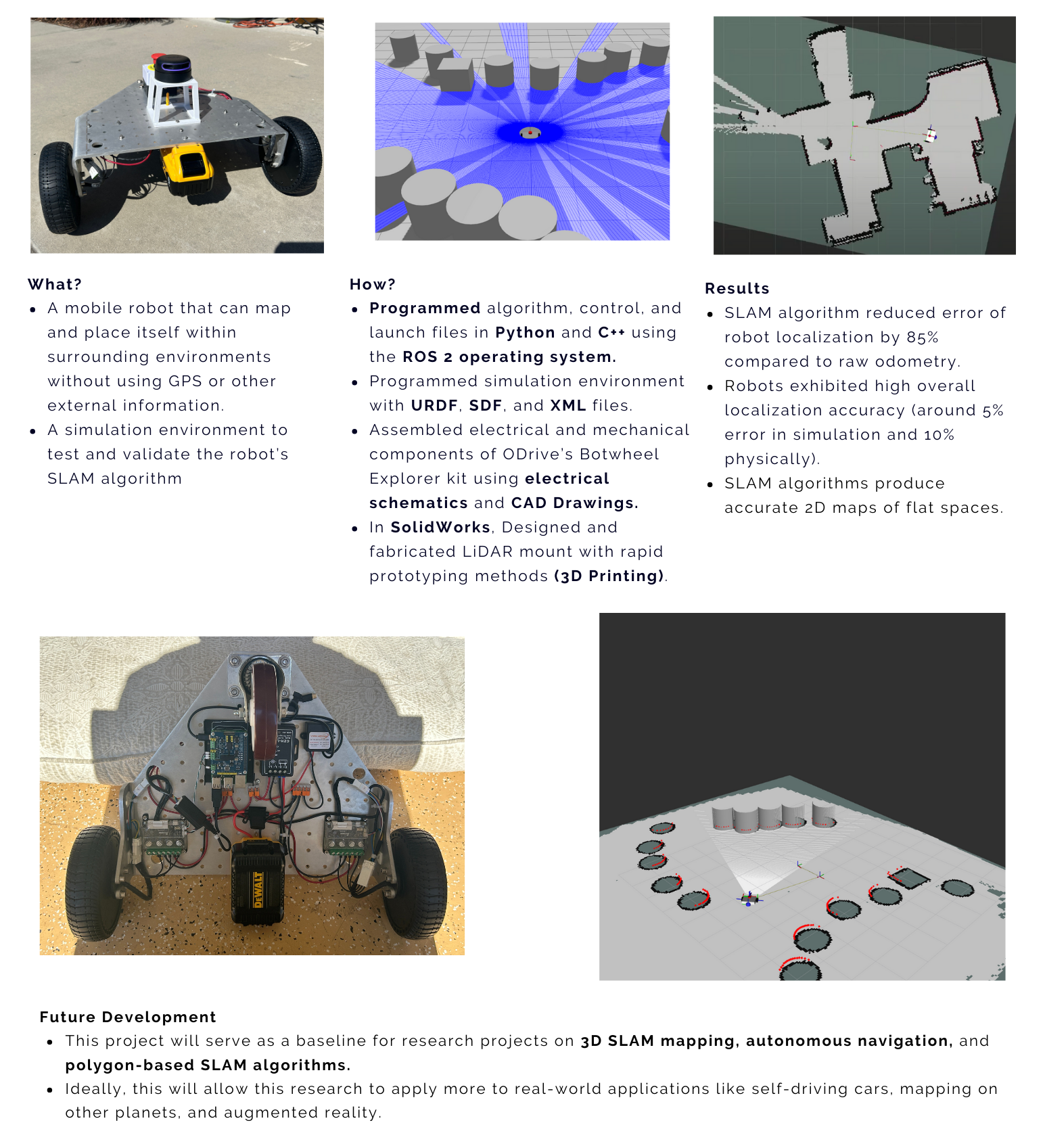
In the Summer of 2024, I received Northwestern University's Summer Undergraduate Research Grant. With it, I created a physical and simulated mobile robot and a 2D LiDAR SLAM algorithm that allows robots to map out 2D environments and locate themselves within these maps with high levels of accuracy.
Here's a quick rundown of the skills I gained and the results I produced:
Github: https://github.com/foongi/botwheel
Additional images:
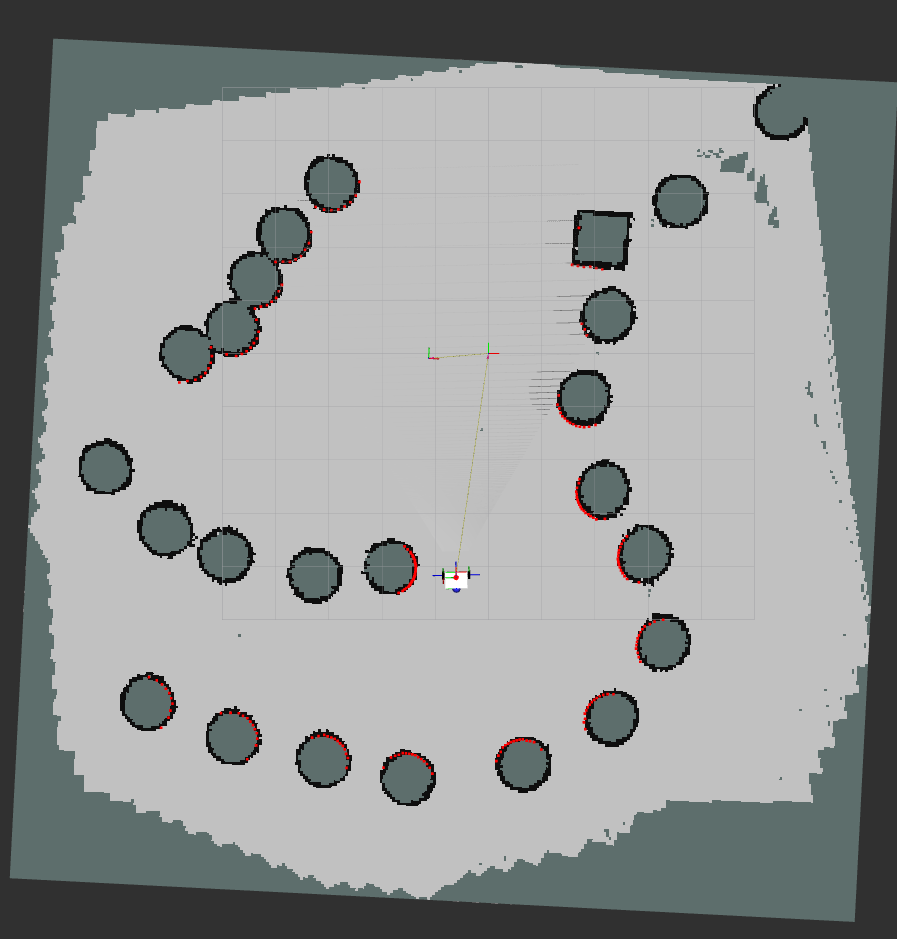
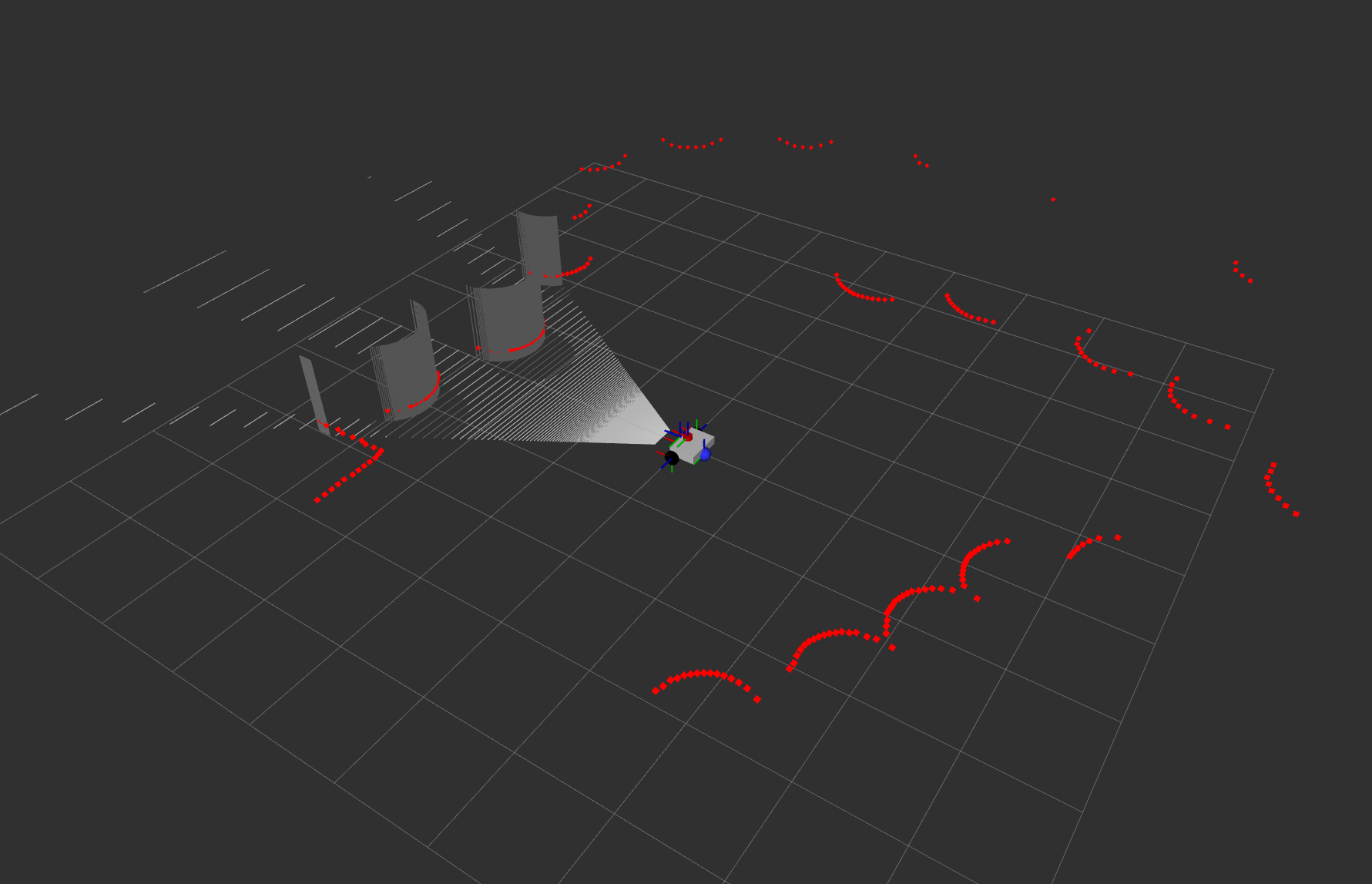
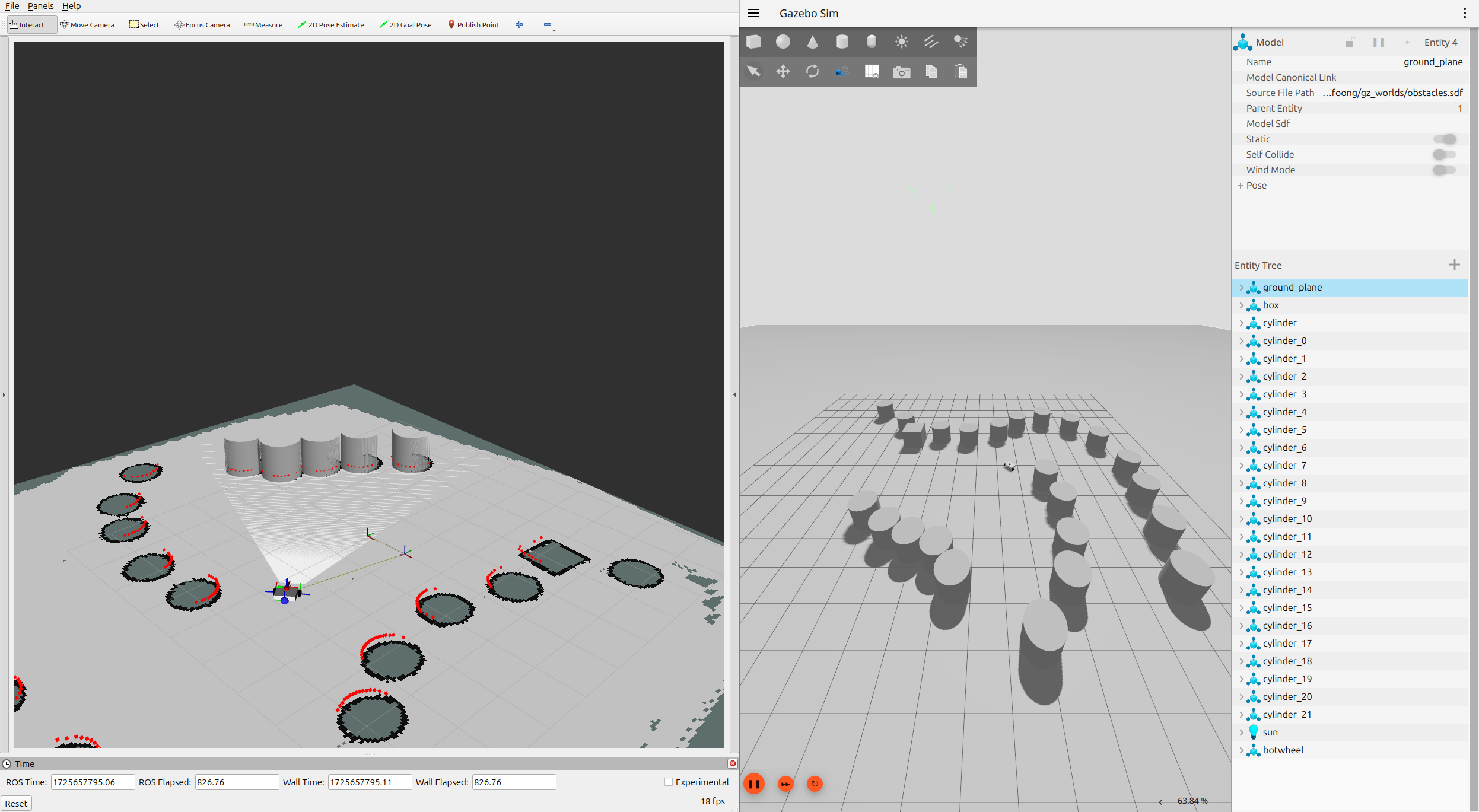
Left: Mapping within a simulation environment. Right: Perception of the robot within the simulation environment.